


Gazebo kinect best sale
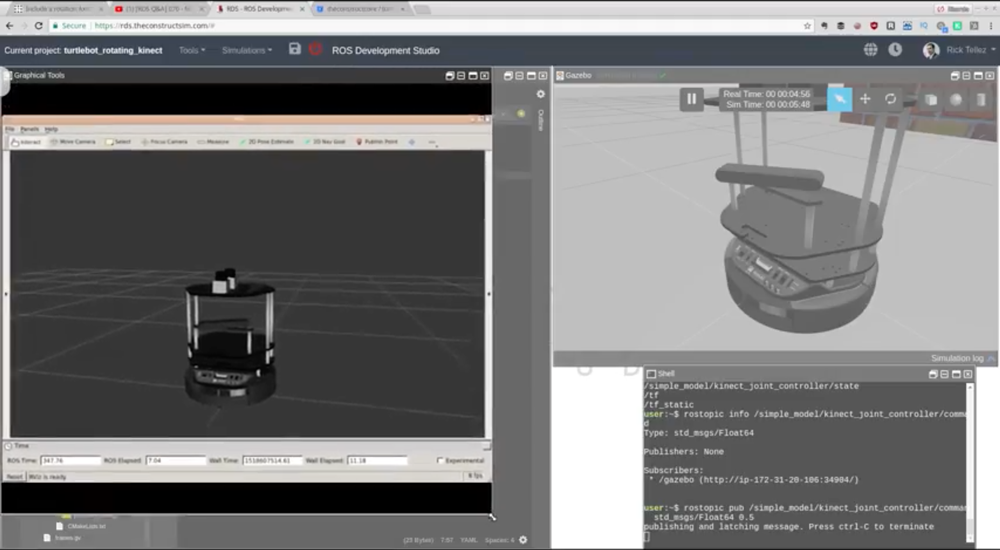
Gazebo kinect best sale, ROS Q A 104 How to add a rotating join to Kinect in Turtlebot best sale
$0 today, followed by 3 monthly payments of $11.67, interest free. Read More
Gazebo kinect best sale
ROS Q A 104 How to add a rotating join to Kinect in Turtlebot
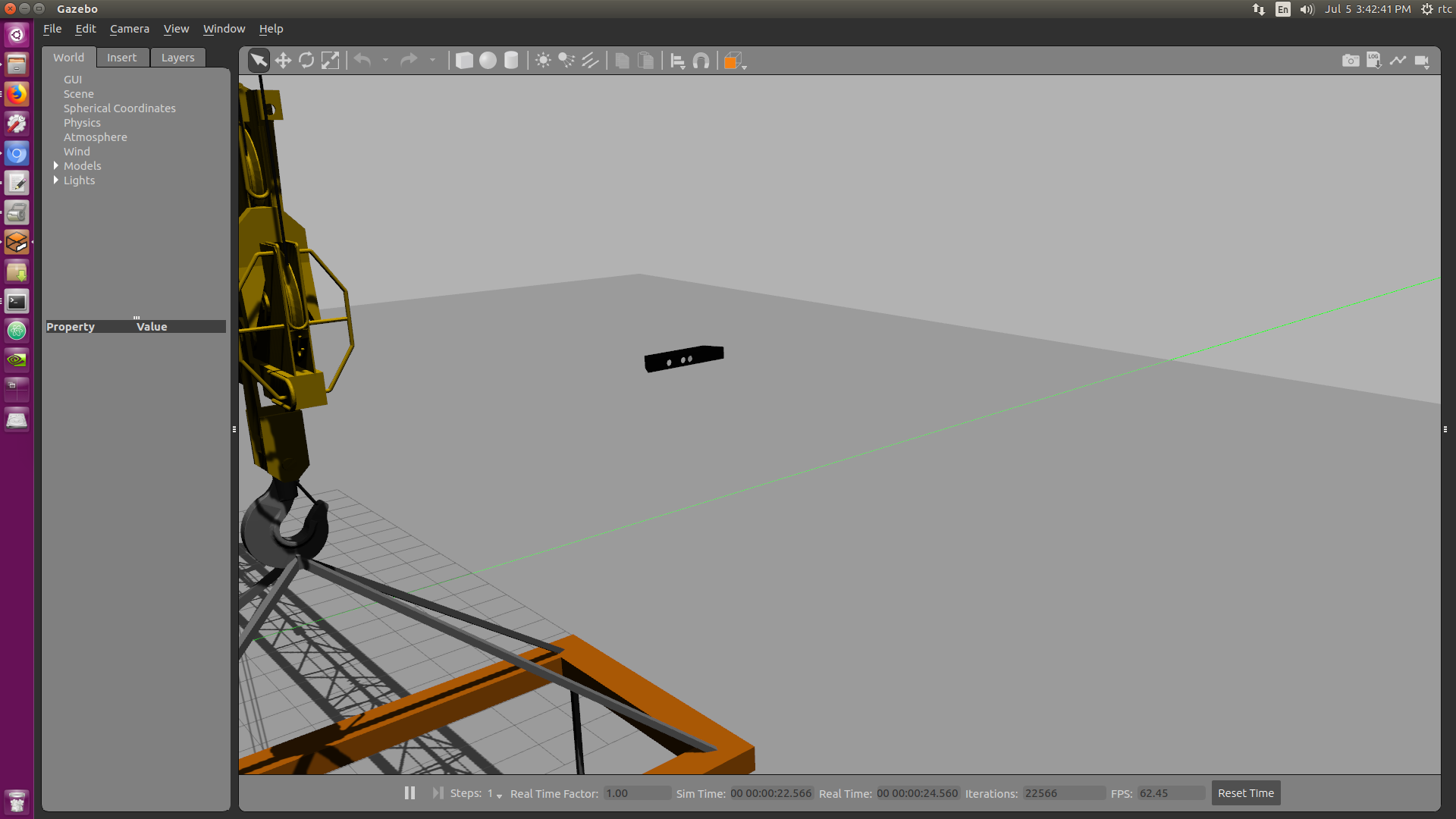
gazebo 06 gazebo kinect CSDN
kinect gazebo
transform Gazebo Kinect Plugin Point Transformation for RayShape
MOTOMAN SIA5 Multi Kinect V2 Moveit on Gazebo
Kinect not publishing topic in Gazebo ROS Answers Open Source
toriltv.com
Product id: Gazebo kinect best salekinect gazebo best sale, transform Gazebo Kinect Plugin Point Transformation for RayShape best sale, MOTOMAN SIA5 Multi Kinect V2 Moveit on Gazebo best sale, Kinect not publishing topic in Gazebo ROS Answers Open Source best sale, Tutorial 8 Simulation Sensors 240AR060 Introduction to ROS best sale, transform Gazebo Kinect Plugin Point Transformation for RayShape best sale, A virtual environment in the Gazebo simulator. Download best sale, ROS Integration Quadrotor Model Dynamics Sensor Simulation best sale, gazebo Mapping with kinect instead of Hokuyo laser Robotics best sale, Description of all the steps realized in the Gazebo simulator best sale, Kinect sensor unable to see objects placed in front of it ROS best sale, transform Gazebo Kinect Plugin Point Transformation for RayShape best sale, A virtual environment in the Gazebo simulator. Download best sale, ROS 3D best sale, The simulated indoor environment implemented in Gazebo with best sale, ROS 3D best sale, Real World Robotic Control Andrew Lobbezoo University of Waterloo best sale, Kinect depth cloud appears toward top Z axis rather than front best sale, Kinect Parrot AR.Drone Robot Operating System Simulation gazebo best sale, GitHub Eavis ROS Kinect Gazebo Simulation Environment Set up best sale, transform Gazebo Kinect Plugin Point Transformation for RayShape best sale, LiDAR ray emitted for localization of the landmarks in Gazebo best sale, ROS Gazebo and RVIZ Moving Robot Using Kinect By Munera YouTube best sale, Depth camera visualization ROSDS Support The Construct ROS best sale, Octomap flipped Issue 3 ros industrial workcell explorer GitHub best sale, gazebo Simulated kinect Robotics Stack Exchange best sale, Flickering Depth Camera image inside Gazebo Topic Visualization best sale, ROS world robot sensor simulation mapping localization Work best sale, Moveit perception pipeline octomap position is wrong with Gazebo best sale, gazebo kinect gazebo best sale, ROS Tutorial How to use a depth camera with Moveit for collision best sale, Use a Gazebo Depth Camera Kinect with ROS best sale, Control NimBro robot in Gazebo using Kinect sensor with ROS best sale, ROS Q A 104 How to add a rotating join to Kinect in Turtlebot best sale, gazebo 06 gazebo kinect CSDN best sale.
-
Next Day Delivery by DPD
Find out more
Order by 9pm (excludes Public holidays)
$11.99
-
Express Delivery - 48 Hours
Find out more
Order by 9pm (excludes Public holidays)
$9.99
-
Standard Delivery $6.99 Find out more
Delivered within 3 - 7 days (excludes Public holidays).
-
Store Delivery $6.99 Find out more
Delivered to your chosen store within 3-7 days
Spend over $400 (excluding delivery charge) to get a $20 voucher to spend in-store -
International Delivery Find out more
International Delivery is available for this product. The cost and delivery time depend on the country.
You can now return your online order in a few easy steps. Select your preferred tracked returns service. We have print at home, paperless and collection options available.
You have 28 days to return your order from the date it’s delivered. Exclusions apply.
View our full Returns and Exchanges information.
Our extended Christmas returns policy runs from 28th October until 5th January 2025, all items purchased online during this time can be returned for a full refund.
Find similar items here:
Gazebo kinect best sale
- gazebo kinect
- gazebo joint types
- ros robot simulator
- gazebo velodyne
- hector gazebo
- easy robot project
- tutorial gazebo
- kapow tool
- gazebo realsense
- gazebo_plugins